Upload date
All time
Last hour
Today
This week
This month
This year
Type
All
Video
Channel
Playlist
Movie
Duration
Short (< 4 minutes)
Medium (4-20 minutes)
Long (> 20 minutes)
Sort by
Relevance
Rating
View count
Features
HD
Subtitles/CC
Creative Commons
3D
Live
4K
360°
VR180
HDR
2,586 results
Louder version of Lec 15 MIT 6.046J. For more muses about algorithms, python and mozilla hacking, visit ...
3,110 views
13 years ago
Lecture 20: Temporal Difference Learning with Function Approximation Topics covered: Temporal difference learning with ...
10 views
9 months ago
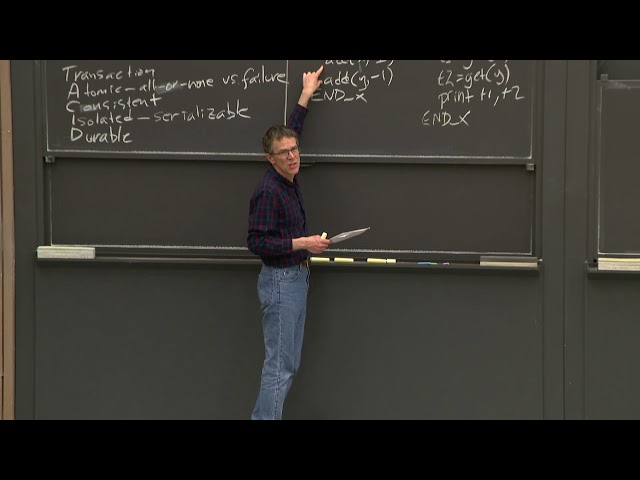
Lecture 12: Distributed Transactions MIT 6.824: Distributed Systems (Spring 2020) https://pdos.csail.mit.edu/6.824/
55,303 views
6 years ago
Newton's Method Source: OCW MIT - Massachusetts Institute of Technology More information is available in the playlist details.
75 views
11 months ago
Join course lead Sina Golara with your problems from practice from SC1x as part of https://micromasters.mit.edu/scm/
999 views
Streamed 7 years ago
Lecture 16: Introducing Stochastic Optimal Control Topics covered: Introducing stochastic optimal control Instructors: Russell ...
8 views
Lecture 10: Trajectory Stabilization and Iterative Linear Quadratic Regulator Topics covered: Trajectory stabilization and iterative ...
20 views
Lecture 05: Numerical Optimal Control (Dynamic Programming) Topics covered: Numerical optimal control (dynamic ...
6 views
Duality Theory I Source: OCW MIT - Massachusetts Institute of Technology More information is available in the playlist details.
34 views
Recorded 22 May 2025. Jason Altschuler of the Massachusetts Institute of Technology presents "Near-Linear Runtime for a ...
855 views
10 months ago
Semidefinite Optimization I Source: OCW MIT - Massachusetts Institute of Technology More information is available in the playlist ...
Recitation 04 Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology More information is ...
5 months ago
The R-square (Pearson's coefficient of determination) is a metric used to evaluate "how good" a linear regression model is.
39,413 views
8 months ago
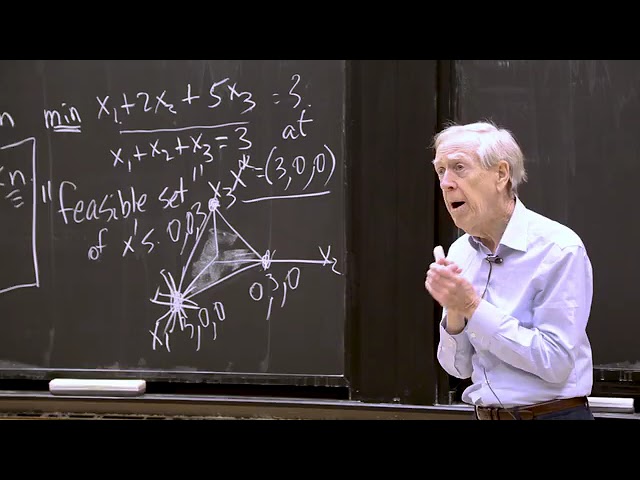
Lecture 24: Linear Programming and Two-Person Games Description This lecture focuses on several topics that are specific parts ...
5 views
4 days ago
Lecture 09: Trajectory Optimization Topics covered: Trajectory optimization Instructors: Russell Tedrake Source: OCW MIT ...
4 views
Session 10: Dictionaries Description: Dictionaries: Universal, k-wise independent, simple tabulation hashing; chaining, dynamic ...
40 views
1 year ago
I was asked to talk about neural networks with the members of The 77 Lab at MIT, so I came up with this material.
1,095 views
Recitation 03 Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology More information is ...
Lecture 10: Finite Differences in Time Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology ...
30 views
A question on linear programming's application to the motions and stresses is addressed. Speaker: Erik Demaine Source: OCW ...
7 views