Upload date
All time
Last hour
Today
This week
This month
This year
Type
All
Video
Channel
Playlist
Movie
Duration
Short (< 4 minutes)
Medium (4-20 minutes)
Long (> 20 minutes)
Sort by
Relevance
Rating
View count
Features
HD
Subtitles/CC
Creative Commons
3D
Live
4K
360°
VR180
HDR
208 results
Lecture 20: Temporal Difference Learning with Function Approximation Topics covered: Temporal difference learning with ...
10 views
9 months ago
Lecture 16: Introducing Stochastic Optimal Control Topics covered: Introducing stochastic optimal control Instructors: Russell ...
8 views
Newton's Method Source: OCW MIT - Massachusetts Institute of Technology More information is available in the playlist details.
74 views
11 months ago
Lecture 10: Trajectory Stabilization and Iterative Linear Quadratic Regulator Topics covered: Trajectory stabilization and iterative ...
19 views
Lecture 05: Numerical Optimal Control (Dynamic Programming) Topics covered: Numerical optimal control (dynamic ...
6 views
Recitation 04 Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology More information is ...
5 months ago
Lecture 09: Trajectory Optimization Topics covered: Trajectory optimization Instructors: Russell Tedrake Source: OCW MIT ...
4 views
Recorded 22 May 2025. Jason Altschuler of the Massachusetts Institute of Technology presents "Near-Linear Runtime for a ...
852 views
Lecture 24: Linear Gaussian Channels Topics covered: Linear Gaussian Channels Instructor: Prof. David Forney Source: OCW ...
Recitation 03 Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology More information is ...
Lecture 04: Optimal Control of the Double Integrator (cont.) Topics covered: Optimal control of the double integrator (continued) ...
Lecture 10: Finite Differences in Time Instructor: Prof. Gilbert Strang Source: OCW MIT - Massachusetts Institute of Technology ...
30 views
Semidefinite Optimization I Source: OCW MIT - Massachusetts Institute of Technology More information is available in the playlist ...
73 views
Lecture 11: Reed-Solomon Codes Topics covered: Reed-Solomon Codes Instructor: Prof. David Forney Source: OCW MIT ...
Lecture 05: Error Correction, Syndrome Decoding Description: This lecture continues to explore error correction through a closer ...
17 views
Lecture 04: Linear Block Codes, Parity Relations Description: This lecture continues to cover linear block codes. The generator ...
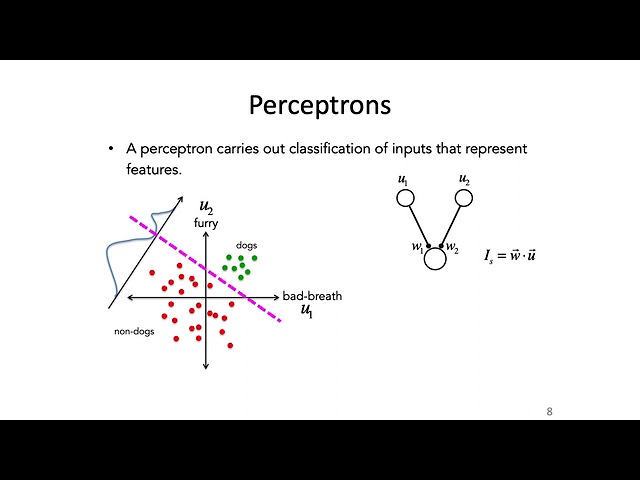
15 Matrix Operations Description: This video covers perceptrons, the learning rule, neuronal logic, linear separability, invariance, ...
20 views
7 months ago
Lecture 16: Recursion on Non-Numerics Topics: Recursion: Fibonacci, Fibonacci with a dict, recursion on non-numerics, ...
7 views
Lecture 24: Linear Programming and Two-Person Games Description This lecture focuses on several topics that are specific parts ...
0 views
7 hours ago
Lecture 19: The Sum-Product Algorithm Topics covered: The Sum-Product Algorithm Last session of the course Instructor: Prof.