therobotstudio
0 subscribers
Info
For more than two decades I have created extraordinary robots based on the functional anatomy of the real human body. Unlike the stiff, heavy machines of industry my robots have a bounce to their movements that gives them a naturally pleasing style of motion. Springs placed in-line with every tendon and in every driven joint produce a compliant mechanical structure that allows the robot to automatically fit into its surroundings, just like we do. Instead of the precision of industrial robots to blindly execute tasks we rely on computer vision, tactile feedback, simulation and NVDIA powered AI to produce the next level of robot performance. A more human approach for a robot that can work next to people.
Stats
Joined Invalid Date
0 total views
Featured video









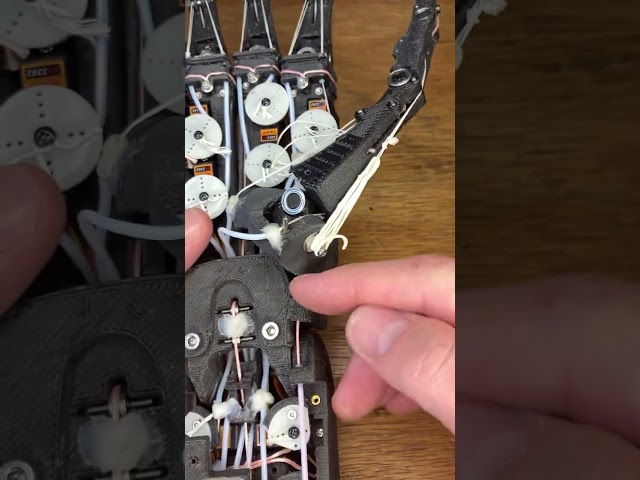

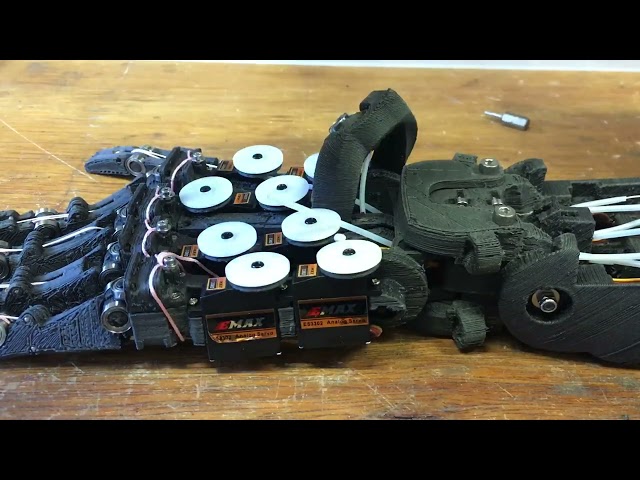
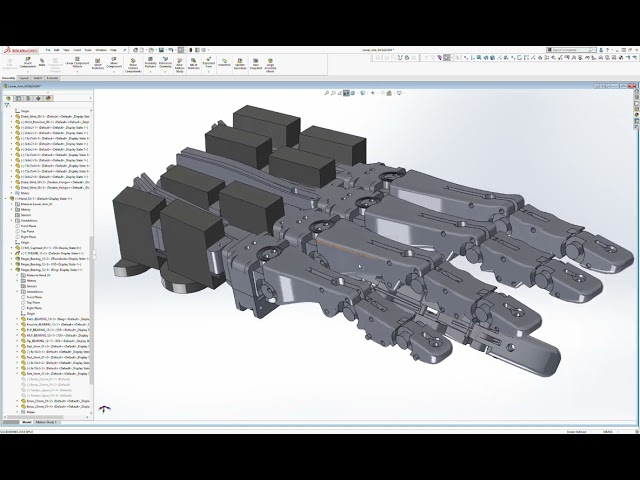
ROBOT NANO HAND
12,735 views

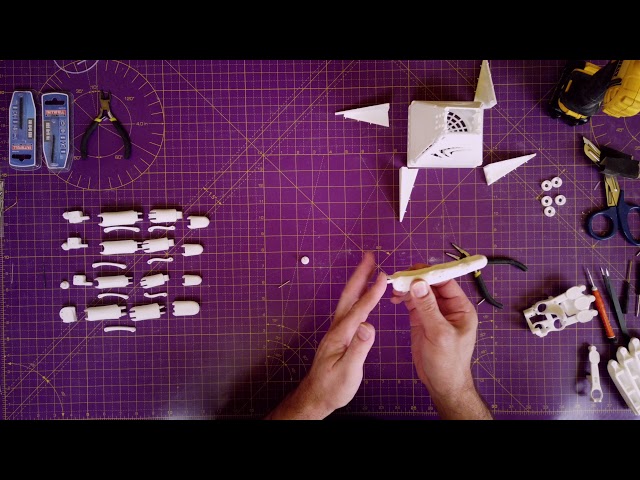
Step 2 Assemble fingers and thumb
1,487 views
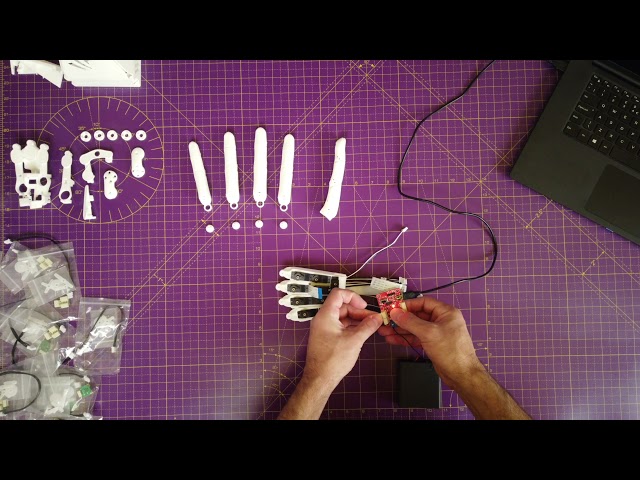
Step 3 Servos Set up
1,208 views

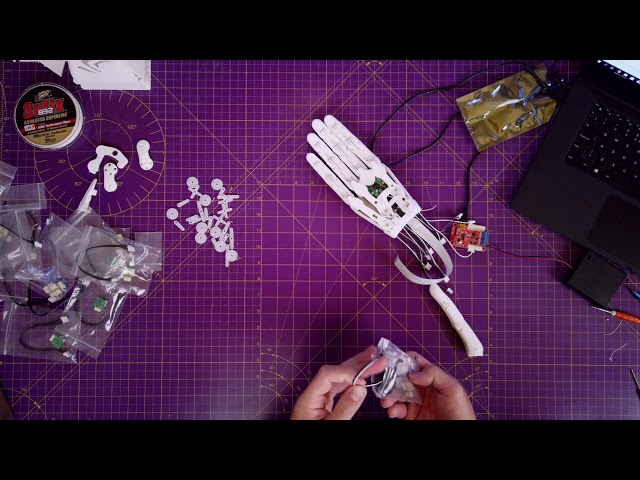

Step 6 Install tendons
949 views
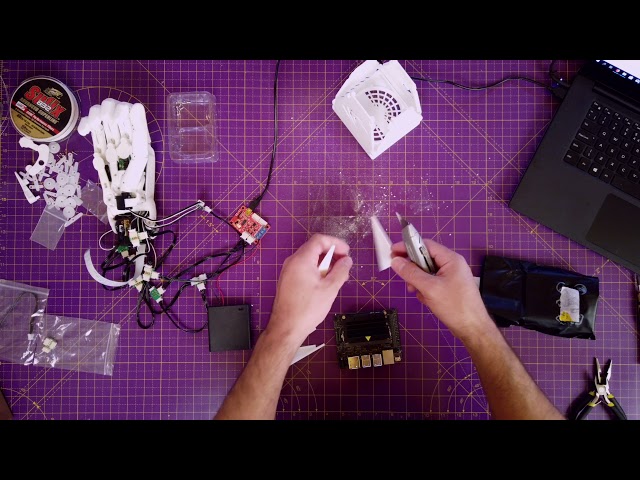
Step 7 Final assembly
1,114 views

Robot Nano Hand - Finger Assembly
7,752 views




Archive IMG 1540 - arm tests
786 views




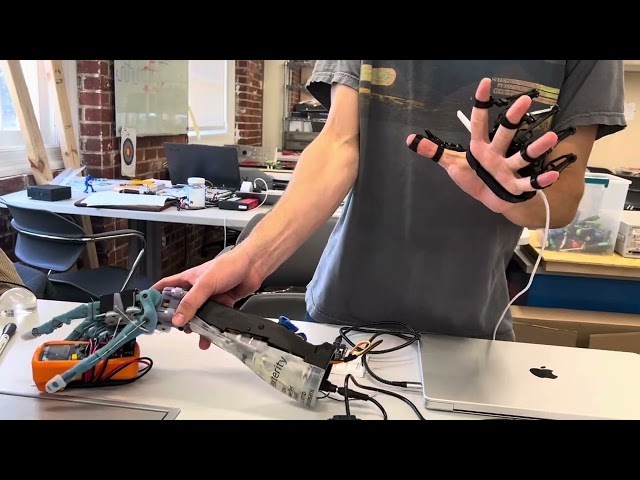
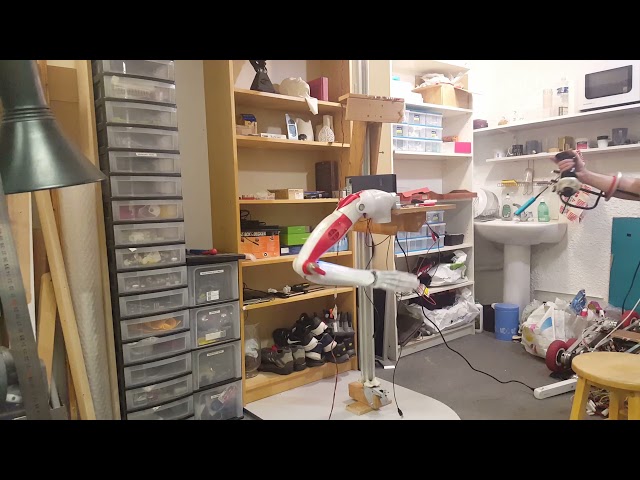
Wearable robot arm
533 views

Wearable robot arm
839,895 views

Robot fish - green scales
432,876 views
Robot fish - green scales
432,876 views

Robot fish - shark
300,643 views


How to hand build a humanoid robot
73,825 views


Robot fish - blue scales
25,098 views

Robot fish - 1st generation
23,296 views

How to make a low cost robot hand!
18,958 views


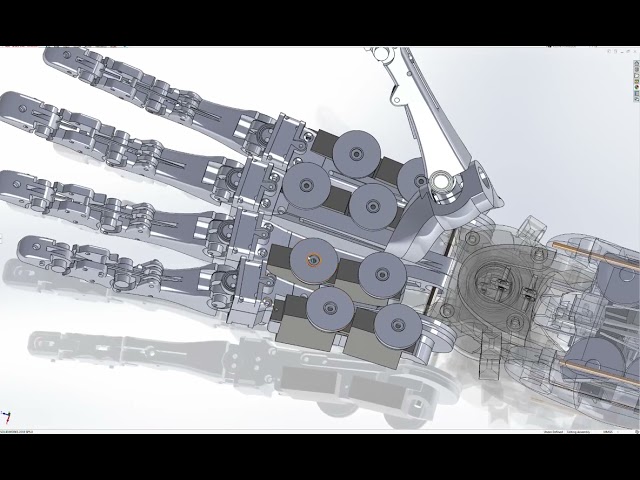
Complete Arm 15 CAD Fly round
2,317 views
3d printed robot arm
2,048 views
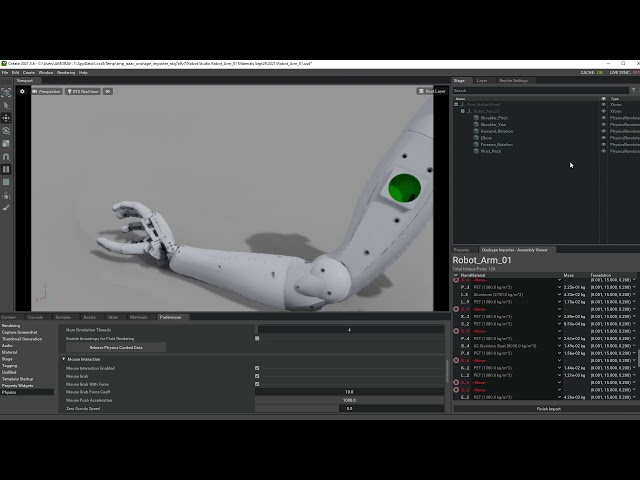
#Robot Arm movements in Omniverse
1,520 views

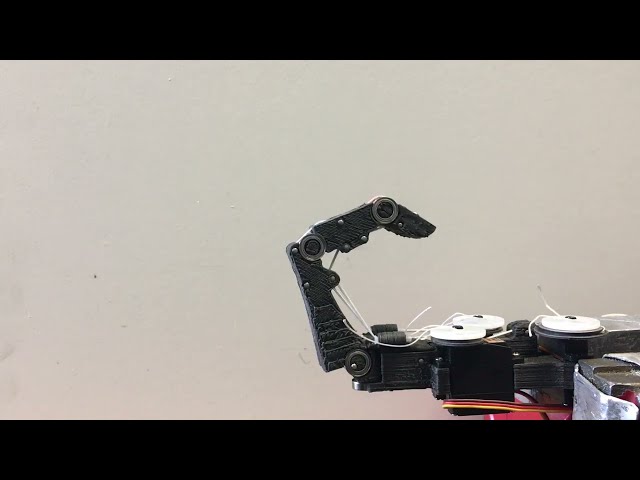
Finger test
943 views

#3dprinted shells for the forearm
3,142 views

Robot arm drop
544 views

Robot Upper Arm
464 views